
Carbon® University Program:
Insect-Sized Robots Get an Explosive Boost from Carbon and EPX 86FR
By Cameron Aubin


“Carbon’s M1 has proven to be a differentiating technology throughout my academic career.”
Cameron Aubin
Introduction
Many roboticists take inspiration from biology when designing their creations. You might have seen videos of humanoid robots performing acrobatic feats, or quadrupedal, canine-like robots assisting technicians in industrial settings. However, a growing group of scientists and researchers are turning their focus to much smaller length scales.
Insect-sized robots represent a rapidly-expanding area of interest among roboticists. In the past two decades miniature robots, from a few inches in length to just a single millimeter, have been made to jump like grasshoppers, fly like bumblebees, and crawl like cockroaches. Their intended functions: everything from environmental monitoring and exploration, to search and rescue and digital agriculture. The future looks bright for these biologically-inspired bots, but a number of challenges still remain.
Research Challenge
Physical scaling laws make conventional actuators (things like motors, pumps, or engines) difficult (if not impossible) to implement, let alone manufacture, at these reduced scales. As a result, state-of-the-art insect-scale robots are primarily actuated by bespoke mechanisms. These mechanisms are usually electrically driven, often by high voltages, but they are typically lacking in important metrics like force output, displacement, and power density. Insects are famously capable of feats of strength or speed that belie their small size, but these micro actuators often fall short of truly mimicking their biological counterparts.
The Solution: A new type of micro actuator powered by energy-dense chemical fuel.
Early in my graduate career my advisor, Dr. Robert Shepherd (read about his work here), approached me with the idea of creating a new type of actuator. Several years prior, while working as a postdoc at Harvard, Rob had published a paper in which he used the combustion of hydrocarbon fuels to power a soft jumping robot, roughly the size of a human hand. The principle was fairly straightforward: in a combustion reaction, heat and energy are rapidly released, which results in an expansion of both the ambient and product gases. If you contain this combustion to a soft, flexible volume, the expanding gases will cause the volume to quickly and forcefully inflate, rather like a balloon. Our idea was to create a much, much smaller actuator that operated under these same principles.
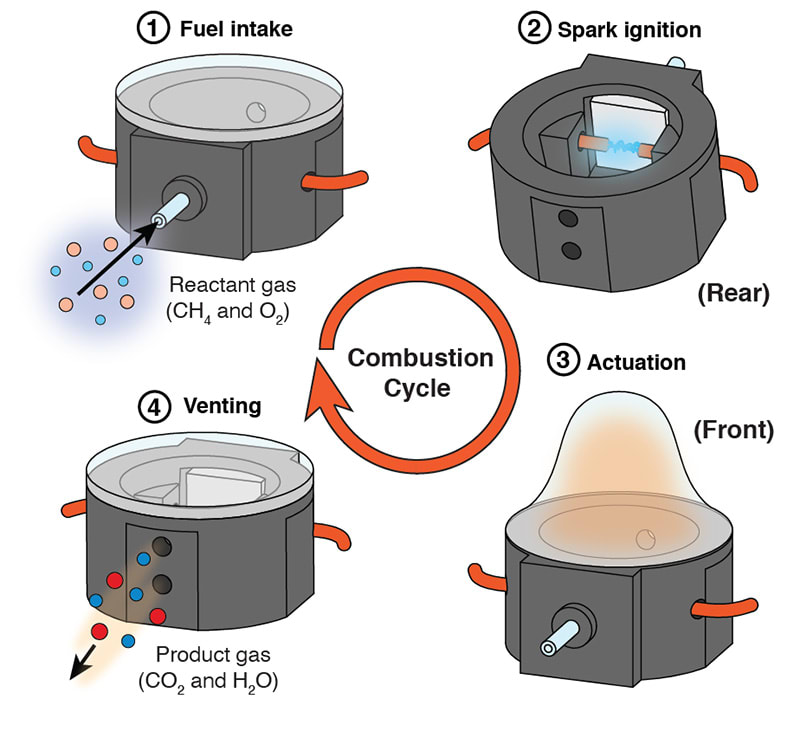
Figure 1. Diagram of the combustion actuation process
SOURCE: Figure 1B in: Cameron A. Aubin, et al. Powerful, soft combustion actuators for insect-scale robots. Science 381, 1212-1217 (2023). DOI:10.1126/science.adg5067
Utilizing the Carbon Printer
My immediate inclination was to turn to our group’s Carbon M1 printer, which had rapidly established itself as the most powerful prototyping tool in the lab. Most micro actuators that I had come across in the literature were created through a combination of Micro-Electromechanical System (MEMs)-based fabrication techniques and manual assembly. The high resolution and extensive material library of the M1 meant that I could automate much of this process. 3D printing our actuator materials maximized our ability to intelligently iterate. Additionally, the knowledge that our eventual designs could be cheaply and rapidly produced in parallel gave us a sense of scalability that felt unique.
Our early designs looked a bit like drums (the musical instruments), consisting of a rigid, hollow cylindrical body roughly 8 mm in diameter, capped by a thin, flexible elastomer membrane. A combination of methane and oxygen would be externally pumped into the actuators through thin lengths of tubing. We could then ignite these combustible gases using sparking electrodes embedded within the actuator body. Our hope was that the resulting tiny explosion would lead to the inflation of the soft membrane. As luck would have it, after a great deal of trial, error, experimentation, and iteration, that’s exactly what we were able to achieve.
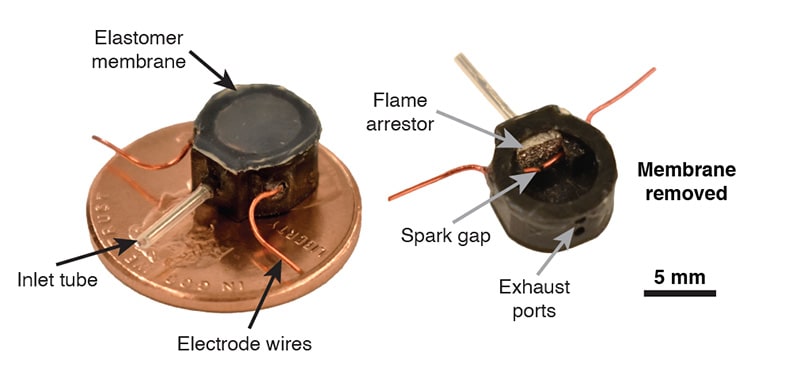
Figure 2. Front (left) and rear (right) view of the actuator and its component materials
SOURCE: Figure 1A in Cameron A. Aubin et al. Powerful, soft combustion actuators for insect-scale robots. Science 381, 1212-1217 (2023). DOI:10.1126/science.adg5067
Finding the Right Materials
We had essentially created a soft, single-piston combustion engine, weighing a whopping 325 mg. By changing the fuel concentration fed into the actuators, we could dynamically adjust the force and displacement of our expanding membrane. Similarly, by changing the rate at which we initiated sparking, we could alter the actuation frequency. However, we continued to be plagued by a serious problem. The 3D-printed actuator bodies were not durable enough to withstand the force and heat produced during cyclic operation. Our actuators were cracking, deteriorating, and in some instances igniting into miniature fireballs.
Figure 3. Actuator (made from an ABS-like material) on fire
We tried several different material solutions before we turned to Carbon for assistance. While chatting with some of their engineers about the thermal capabilities of their suite of materials, I learned that Carbon was currently experimenting with a new, then-unreleased flame-resistant material called EPX 86FR. They agreed to print some sample parts for me, and our problems were solved virtually overnight. This new material possessed much greater stability at higher temperatures, allowing us to run these micro actuators with input parameters that were previously unfeasible. The diminutive explosions that had consumed many of our previous prototypes were kept at bay by the EPX 86FR chamber bodies.
The Final Design
We were now able to begin formally characterizing our designs, which ended up registering a maximum displacement of 140%, a maximum actuation frequency of 100Hz, and a max blocked force over 9N—more than an order of magnitude greater than what similarly-sized electromechanical actuators could produce.
To demonstrate the efficacy of our devices in powering insect-scale robots, we designed and fabricated a 1.6-g quadrupedal robot with built-in actuators as the feet. Again, we used Carbon’s help and experimental EPX 86FR material throughout our prototyping process. We showcased our robot’s ability to both crawl at high speeds and jump great distances (over 20x body length). Our robot could turn, change direction, and avoid obstacles. Impressively, it was even able to operate while carrying a payload more than 22 times its body weight, which is comparable to the abilities of ants, cockroaches, and many species of beetles. Our final work was published in the journal Science in September, 2023 (read here).
SOURCE: Includes movies S2, S5, S6, and S7 from Cameron A. Aubin et al. Powerful, soft combustion actuators for insect-scale robots. Science 381, 1212-1217 (2023).DOI:10.1126/science.adg5067
Looking to the Future
In a few months, I will be starting my new career as an Assistant Professor of Robotics at the University of Michigan. At the very top of my equipment list for my new lab is a Carbon printer. It has proven to be a differentiating technology throughout my career as a scientist and engineer, and I want to continue working with these machines (and the wonderful support staff at Carbon) as I explore new frontiers in the realm of power and energy storage for robots.
3D as It’s Meant to Be
Reach out to Cameron Aubin at caubin@umich.edu to learn more about his work utilizing the Carbon DLS process.
Interested in using the Carbon DLS process for your research efforts? Reach out to us at sales@carbon3d.com to learn more about the Carbon® University Program.